





Муҳаррики қадамзании винтии гибридии Nema 14 (35 мм) бо кунҷи қадам 1.8° Шиддат 1.4 / 2.9V Ҷараён 1.5A,4 Симҳои сурбӣ
Муҳаррики қадамзании винтии гибридии Nema 14 (35 мм) бо кунҷи қадам 1.8° Шиддат 1.4 / 2.9V Ҷараён 1.5A,4 Симҳои сурбӣ
Муҳаррики қадамзании гибридии Nema 14 (35 мм), дуқутба, 4-симӣ, винти курашакл, садои паст, мӯҳлати хизмати дароз, самаранокии баланд, сертификатсияшудаи CE ва RoHS.
Тавсиф
| Номи маҳсулот | Муҳаррики қадамгузори винтии гибридии 35 мм |
| Модел | VSM35BSHSM |
| Навъ | муҳаррикҳои гибридии қадамӣ |
| Кунҷи зинапоя | 1.8° |
| Шиддат (В) | 1.4 / 2.9 |
| Ҷараён (A) | 1.5 |
| Муқовимат (Ом) | 0.95 / 1.9 |
| Индуктивӣ (мГ) | 1.5 / 2.3 |
| Симҳои сурбӣ | 4 |
| Дарозии муҳаррик (мм) | 34 / 45 |
| Ҳарорати муҳити зист | -20℃ ~ +50℃ |
| Баландшавии ҳарорат | Ҳадди аксар 80 ҳазор. |
| Қувваи диэлектрикӣ | Ҳадди аксар 1 мА дар 500 В, 1 кГц, 1 сония. |
| Муқовимат ба изолятсия | Ҳадди ақал 100MΩ @500Vdc |
Сертификатсияҳо

Параметрҳои барқӣ:
| Андозаи муҳаррик | Шиддат/ Марҳила (V) | Айни/ Марҳила (А) | Муқовимат/ Марҳила (Ω) | Индуктивӣ/ Марҳила (мҲ) | Шумораи Симҳои сурбӣ | Инерсияи ротор (г.см)2) | Вазни муҳаррик (г) | Дарозии муҳаррик L (мм) |
| 35 | 1.4 | 1.5 | 0.95 | 1.4 | 4 | 20 | 190 | 34 |
| 35 | 2.9 | 1.5 | 1.9 | 3.2 | 4 | 30 | 230 | 47 |
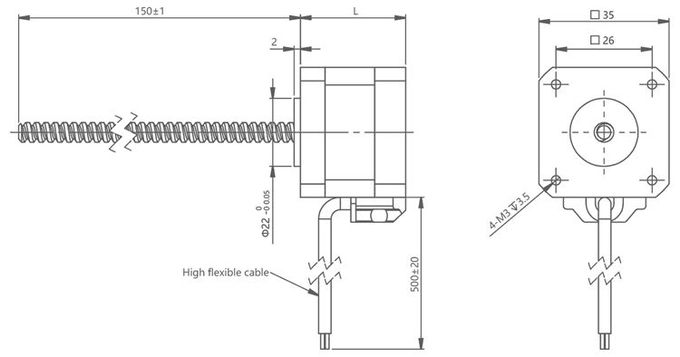
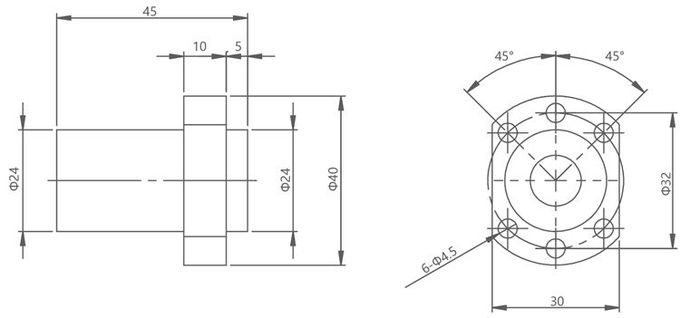
Нақшаи контурии муҳаррики берунаи стандартии VSM35BSHSM
Эзоҳҳо:
Дарозии винти сурбро метавон танзим кард
Коркарди фармоишӣ дар охири винти сурб қобили истифода аст
Лутфан, барои гирифтани маълумоти бештар дар бораи хусусиятҳои винтҳои курашакл бо мо тамос гиред.
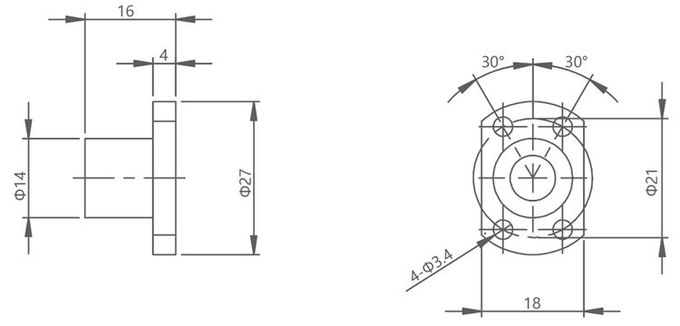
Нақшаи контурии VSM35BSHSMBайкаи кулоҳӣ 0801 ё 0802
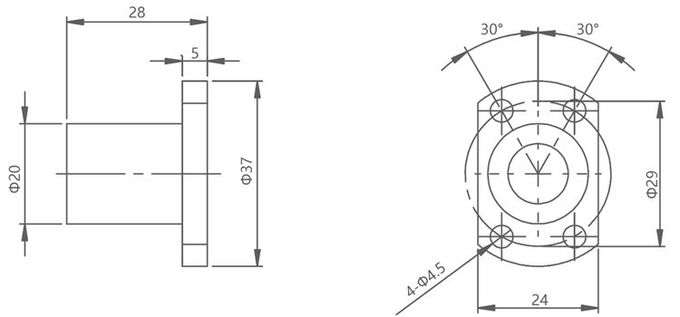
Нақшаи контурии VSM35BSHSMBайкаи кулоҳӣ 1202
Нақшаи контурии гайкаи кулоҳакӣ VSM35BSHSMB 1205:
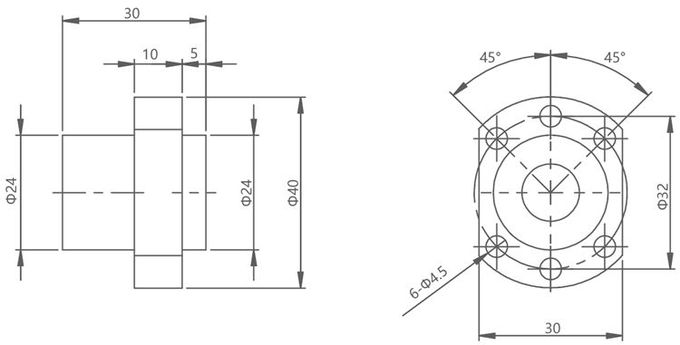
Нақшаи контурии VSM35BSHSMBайкаи кулоҳӣ 1210
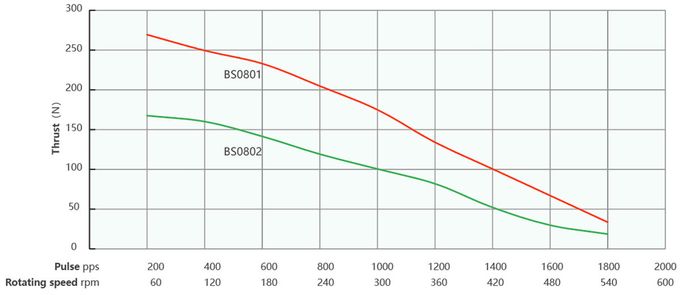
Каҷхати суръат ва теладиҳӣ
Драйвери чоппери дуқутба бо дарозии муҳаррики силсилаи 35, ки 34 мм аст
Басомади импулси ҷорӣ 100% ва каҷравии тела
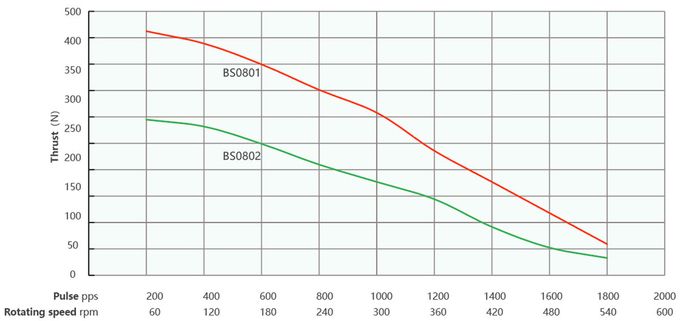
Драйвери чоппери дуқутба бо дарозии муҳаррики силсилаи 35 бо дарозии 47 мм
Басомади импулси ҷорӣ 100% ва каҷравии тела
| Сурб (мм) | Суръати хаттӣ (мм/с) | |||||||||
| 1 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| 2 | 2 | 4 | 6 | 8 | 10 | 12 | 14 | 16 | 18 | 20 |
| 5 | 5 | 10 | 15 | 20 | 25 | 30 | 35 | 40 | 45 | 50 |
| 10 | 10 | 20 | 30 | 40 | 50 | 60 | 70 | 80 | 90 | 100 |
Ҳолати санҷиш:Ронандаи чархбол, бе рамп, ним микроқадам, шиддати гардонанда 24В
Соҳаҳои татбиқ:
Автоматикунонии саноатӣ:Моторҳои қадамгузори винтҳои гибридии 35 мм дар барномаҳои автоматикунонии саноатӣ истифодаи васеъ пайдо мекунанд. Онҳоро дар хатҳои васлкунии автоматӣ, системаҳои конвейерӣ, дастҳои роботӣ ва дигар таҷҳизоте, ки ҷойгиркунии дақиқ ва назорати боэътимоди ҳаракатро талаб мекунанд, истифода бурдан мумкин аст.
Мошинҳои CNC:Мошинҳои идоракунии рақамии компютерӣ (CNC) аз муҳаррикҳои қадамзании винтҳои гибридии 35 мм барои дақиқӣ ва дақиқии баланд истифода мебаранд. Ин муҳаррикҳо дар назорати ҳаракати асбобҳои буриш нақши муҳим мебозанд, ки буришҳои дақиқ ва натиҷаҳои якхеларо дар амалиётҳои гуногуни коркард таъмин мекунанд.
Чопи 3D:Моторҳои қадамгузори винтии гибридии 35 мм барои принтерҳои 3D мувофиқанд, ки дар онҳо назорати заруриро барои ҳаракати сари чоп ё платформаи сохтмонӣ таъмин мекунанд. Моменти гардиш ва дақиқии баланди онҳо ба қабатбандии дақиқ ва тафсилоти мураккаб дар объектҳои чопшудаи 3D мусоидат мекунад.
Дастгоҳҳои тиббӣ:Дар соҳаи тиб, муҳаррикҳои зинапояи винтҳои гибридии 35 мм дар дастгоҳҳои гуногуни тиббӣ, аз ҷумла асбобҳои ташхисӣ, роботҳои ҷарроҳӣ, диспенсерҳои автоматии доруворӣ ва дастгоҳҳои протезӣ истифода мешаванд. Ин муҳаррикҳо дақиқӣ ва эътимоднокии заруриро барои расмиёт ва таҷҳизоти муҳими тиббӣ пешниҳод мекунанд.
Таҷҳизоти лабораторӣ:Асбобҳои лабораторӣ ва дастгоҳҳои таҳлилӣ аксар вақт муҳаррикҳои қадамгузори винтҳои 35 мм-и гибридии пневматикиро барои ҷойгиркунии дақиқ ва назорати ҳаракат дар бар мегиранд. Онҳоро дар роботҳои лабораторӣ, системаҳои коркарди моеъ, механизмҳои коркарди намуна ва дигар таҷҳизоте пайдо кардан мумкин аст, ки ҳаракатҳои дақиқ ва такроршавандаро талаб мекунанд.
Системаҳои оптикӣ:Барномаҳои оптика ва фотоника, ба монанди системаҳои лазерӣ, микроскопия, спектроскопия ва системаҳои ҳамоҳангсозии оптикӣ, аз дақиқӣ ва устувории баланд, ки аз ҷониби муҳаррикҳои қадамгузори винтии курашакли 35 мм таъмин карда мешаванд, баҳра мебаранд. Ин муҳаррикҳо имкон медиҳанд, ки ҷузъҳои оптикӣ дақиқ идора карда шаванд ва ҷойгиркунӣ ва ҳамоҳангсозии дақиқи нурро таъмин намоянд.
Бастабандӣ ва тамғагузорӣ:Мошинҳои бастабандӣ ва нишонгузорӣ барои таъмини ҷойгиркунӣ ва истифодаи дақиқи тамғакоғазҳо, маводҳои бастабандӣ ва бастабандӣ ба назорати дақиқи ҳаракат такя мекунанд. Дақиқӣ ва такроршавандагии муҳаррикҳои қадамгузори винтҳои гибридии 35 мм онҳоро барои чунин барномаҳо мувофиқ мегардонад ва самаранокии бастабандӣ ва сифати маҳсулотро беҳтар мекунад.
Таҷҳизоти нимноқилҳо:Дар саноати нимноқилҳо, муҳаррикҳои қадамгузори винтҳои гибридии 35 мм дар таҷҳизоти гуногун, аз ҷумла системаҳои коркарди пластинаҳо, асбобҳои санҷиш ва мошинҳои литография, истифода мешаванд. Ин муҳаррикҳо ба ҳаракати дақиқ ва ҳамоҳангсозии зарурӣ барои равандҳои истеҳсоли нимноқилҳо мусоидат мекунанд.
Бартарӣ
Дақиқии баланди ҷойгиркунӣ:Муҳаррикҳои зинапояи винтҳои курашакли гибридии 35 мм дақиқии баланди ҷойгиркуниро таъмин мекунанд. Системаи интиқоли винтҳои курашакл зарбаи ақибро кам мекунад ва такрори аълоро таъмин мекунад, ки ба муҳаррик имкон медиҳад, ки ба мавқеи дилхоҳ дақиқ бирасад. Ин дақиқӣ дар барномаҳое, ки ҷойгиркунии дақиқ муҳим аст, муҳим аст.
Натиҷаи аълои моменти гардиш:Ин муҳаррикҳо моменти баланди баромадро таъмин мекунанд, ки ба онҳо имкон медиҳад, ки борҳои калонтарро ронанд ё ҳатто бо борҳои гуногун ҳаракати устуворро нигоҳ доранд. Механизми винти курашакл ҳаракати гардиши муҳаррикро ба ҳаракати хаттӣ самаранок табдил медиҳад, ки дар натиҷа интиқоли самараноки моменти баромад ба амал меояд.
Самаранокии баланд:Моторҳои қадамӣ бо вокуниш ва самаранокии худ машҳуранд. Онҳо метавонанд ба сигналҳои идоракунӣ зуд вокуниш нишон диҳанд ва бе ниёз ба сенсорҳо ё системаҳои иловагии бозгашт мавқеъгирии дақиқ ва идоракунии ҳаракатро таъмин кунанд. Ин самаранокӣ ба кори умумии муҳаррик ва системае, ки он ба он муттаҳид карда шудааст, мусоидат мекунад.
Ларзиш ва садои паст:Муҳаррикҳои қадамзании винтҳои гибридии 35 мм одатан ҳангоми кор сатҳи пасти ларзиш ва садоро нишон медиҳанд. Ин хусусият махсусан дар барномаҳое муҳим аст, ки сатҳи пасти садо талаб карда мешавад ё дар ҷойҳое, ки ларзиш метавонад ба кор ё дақиқии система таъсир расонад.
Эътимоднокӣ ва устуворӣ:Ин муҳаррикҳо одатан бо эътимоднокӣ ва устувории баланди худ машҳуранд. Системаи интиқоли винтҳои куравӣ тақсимоти хуби бор ва мӯҳлати хизмати дарозтарро таъмин мекунад, ки ба муҳаррик имкон медиҳад, ки ҳангоми кори тӯлонӣ ва истифодаи такрорӣ устуворӣ ва эътимоднокиро нигоҳ дорад.
Андозаи компакт:Бо шакли компактӣ, муҳаррикҳои қадамгузори винтҳои гибридии 35 мм метавонанд ба осонӣ ба барномаҳое, ки фазои маҳдуд доранд, ворид карда шаванд. Онҳо самаранокии баланд ва назорати дақиқро пешниҳод мекунанд ва ҳамзамон фазои хурдтарро ишғол мекунанд, ки онҳоро барои барномаҳое мувофиқ мегардонад, ки андоза маҳдудият аст.
Идоракунӣ ва амалиёти осон:Моторҳои қадамӣ интерфейси оддии идоракуниро пешниҳод мекунанд, ки имкон медиҳад кори осон ва ҳамгироӣ ба системаҳои гуногуни идоракунӣ таъмин карда шавад. Онҳоро вобаста ба талаботи мушаххаси барнома бо истифода аз сигналҳои импулсӣ ва самтӣ ё алгоритмҳои пешрафтаи идоракунӣ ба осонӣ идора кардан мумкин аст.
Талабот барои интихоби муҳаррик:
► Самти ҳаракат/васлкунӣ
►Талабот барои боркунӣ
►Талабот барои сакта
►Талаботи коркарди ниҳоӣ
►Талаботи дақиқ
►Талабот барои фикру мулоҳизаҳои рамзгузор
►Талабот барои танзими дастӣ
►Талаботи экологӣ
Коргоҳи истеҳсолӣ


Паёми худро ба мо фиристед:
Категорияҳои маҳсулот
-

Муҳаррики қадамзании винтии шаршакли гибридии Nema 8 (20мм) 1...
-

Муҳаррики қадамзании винтии тӯби гибридии Nema 23 (57мм) ...
-

Муҳаррики қадамзании винтии шарии гибридии Nema 17 (42 мм) ...
-

Муҳаррики қадамзании винтии шарии гибридии Nema 34 (86 мм) ...
-

Муҳаррики қадамзании винтии шарии гибридии Nema 11 (28мм) ...