Дар соҳаи истеҳсоли электронии баландсуръат ва дақиқи баланд, адаптерҳои санҷиши сӯзанҳои электронӣ ҳамчун дарвозабонҳо хизмат мекунанд, ки сифати PCB, чипҳо ва модулҳоро таъмин мекунанд. Бо кам шудани фосилаи байни сӯзанҳои ҷузъҳо ва афзоиши мураккабии санҷиш, талабот ба дақиқӣ ва эътимоднокӣ дар санҷиш ба қуллаҳои бесобиқа расидааст. Дар ин инқилоби андозагирии дақиқ, муҳаррикҳои хурди қадамӣ ҳамчун "мушакҳои дақиқ" нақши муҳим доранд. Дар ин мақола ба он меомӯзем, ки чӣ гуна ин ядрои хурди қудратӣ дар адаптерҳои санҷиши сӯзанҳои электронӣ дақиқ кор мекунад ва санҷиши электронии муосирро ба давраи нав мебарад.
一.Муқаддима: Вақте ки дақиқии санҷиш бояд дар сатҳи микрон бошад

Усулҳои анъанавии санҷиш барои ниёзҳои санҷиши бастаҳои микро-қадам BGA, QFP ва CSP-и имрӯза нокифоя шудаанд. Вазифаи асосии адаптери санҷиши сӯзани электронӣ ин рондани даҳҳо ё ҳатто ҳазорҳо зондҳои санҷишӣ барои барқарор кардани пайвастҳои боэътимоди ҷисмонӣ ва электрикӣ бо нуқтаҳои санҷишӣ дар воҳиди зери санҷиш мебошад. Ҳар гуна номувофиқатии ночиз, фишори нобаробар ё тамоси ноустувор метавонад боиси нокомии санҷиш, баҳодиҳии нодуруст ё ҳатто вайроншавии маҳсулот гардад. Моторҳои қадами хурд, бо идоракунии рақамии беназир ва хусусиятҳои дақиқи баланд, ба як роҳи ҳалли беҳтарин барои ҳалли ин мушкилот табдил ёфтаанд.
一.Механизми асосии кори муҳаррики қадами хурд дар адаптер

Кори муҳаррики қадами хурд дар адаптери санҷиши сӯзани электронӣ як гардиши оддӣ нест, балки як силсила ҳаракатҳои ҳамоҳангшудаи дақиқ ва назоратшаванда мебошад. Ҷараёни кори онро метавон ба марҳилаҳои асосии зерин тақсим кард:
1. Ҳамоҳангсозии дақиқ ва ҷойгиркунии ибтидоӣ
Ҷараёни корӣ:
Дастурҳои қабул:Компютери мизбон (мизбони санҷишӣ) маълумоти координатаҳои ҷузъи санҷидашавандаро ба корти идоракунии ҳаракат мефиристад, ки онро ба як қатор сигналҳои импулсӣ табдил медиҳад.
Ҳаракати табдили импулс:Ин сигналҳои импулсӣ ба драйвери муҳаррики хурдқадам фиристода мешаванд. Ҳар як сигнали импулсӣ меҳвари муҳаррикро ба гардиши кунҷи муқарраршуда - "кунҷи зинапоя" водор мекунад. Тавассути технологияи пешрафтаи гардонандаи микроқадампоя, кунҷи пурраи зинапояро метавон ба 256 ё ҳатто зиёда микроқадамҳо тақсим кард, ки бо ин васила назорати ҷойивазкунӣ дар сатҳи микрометр ё ҳатто дар сатҳи зермикрометр ба даст оварда мешавад.
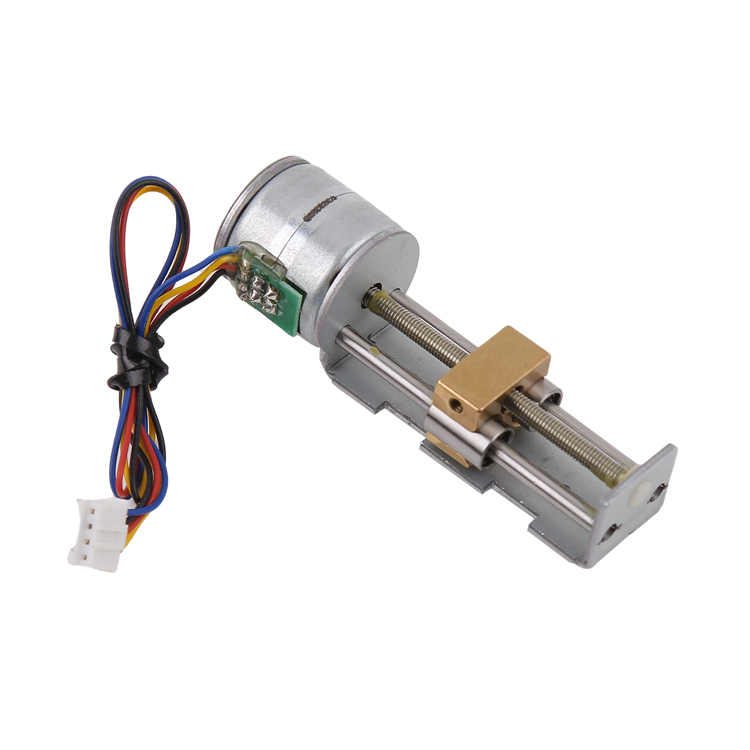
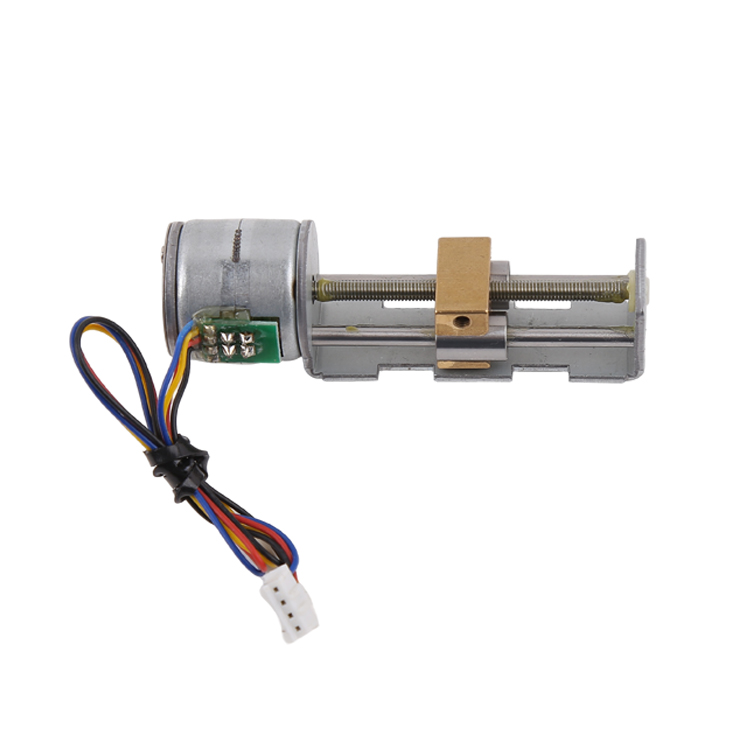
Мавқеи иҷро:Мотор тавассути механизмҳои интиқол, ба монанди винтҳои дақиқ ё тасмаҳои вақт, аробачаи пур аз зондҳои санҷишӣ барои ҳаракат дар сатҳҳои меҳвари X ва Y-ро ба ҳаракат медарорад. Система бо фиристодани шумораи муайяни импулсҳо, массиви зондҳоро ба мавқеъе, ки мустақиман дар болои нуқтаи санҷидашаванда аст, интиқол медиҳад.
2. Идоракунии фишор ва фишурдани назоратшаванда
Ҷараёни корӣ:
Тақриби меҳвари Z:Пас аз анҷом додани ҷойгиркунии ҳамвор, муҳаррики хурди қадамзанӣ, ки барои ҳаракати меҳвари Z масъул аст, ба кор шурӯъ мекунад. Он дастурҳоро мегирад ва тамоми сари санҷиш ё модули ягонаи зондро барои ҳаракати амудӣ ба поён дар баробари меҳвари Z меронад.
Назорати дақиқи ҳаракат:Мотор бо қадамҳои хурд ба таври ҳамвор фишор меорад ва масофаи ҳаракати прессро дақиқ назорат мекунад. Ин хеле муҳим аст, зеро масофаи хеле кӯтоҳи ҳаракат метавонад ба тамос бо ноқис оварда расонад, дар ҳоле ки масофаи хеле дарози ҳаракат метавонад пружинаи зондро аз ҳад зиёд фишор диҳад, ки боиси фишори аз ҳад зиёд ва осеб дидани тахтачаи кафшер мегардад.
Нигоҳ доштани моменти гардиш барои нигоҳ доштани фишор:Вақте ки зонд ба чуқурии тамос бо нуқтаи озмоишӣ мерасад, муҳаррики хурди қадамзанӣ гардишро қатъ мекунад. Дар ин лаҳза, муҳаррик бо моменти баланди нигоҳдории худ, дар ҷои худ маҳкам баста мешавад ва қувваи доимӣ ва боэътимоди поёнро бидуни ниёз ба таъминоти доимии барқ нигоҳ медорад. Ин устувории пайвасти барқро дар тамоми давраи озмоишӣ таъмин мекунад. Хусусан барои озмоиши сигнали басомади баланд, тамос бо механикии устувор асоси якпорчагии сигнал аст.
3. Сканкунии бисёрнуқтаӣ ва санҷиши масири мураккаб
Ҷараёни корӣ:
Барои PCB-ҳои мураккаб, ки озмоиши ҷузъҳоро дар минтақаҳои гуногун ё дар баландиҳои гуногун талаб мекунанд, адаптерҳо якчанд муҳаррикҳои микроқадамро барои ташкили системаи ҳаракати бисёрмеҳварӣ муттаҳид мекунанд.
Система ҳаракати муҳаррикҳои гуногунро мувофиқи пайдарпайии озмоиши пешакӣ барномарезишуда ҳамоҳанг мекунад. Масалан, он аввал минтақаи А-ро месанҷад, сипас муҳаррикҳои XY барои интиқоли массиви зонд ба минтақаи B бо ҳамоҳангӣ ҳаракат мекунанд ва муҳаррики меҳвари Z барои санҷиш дубора пахш мекунад. Ин ҳолати "озмоиши парвоз" самаранокии озмоишро хеле беҳтар мекунад.
Дар тӯли тамоми раванд, қобилияти хотираи дақиқи мавқеи муҳаррик такроршавандагии дақиқии ҷойгиркуниро барои ҳар як ҳаракат таъмин мекунад ва хатогиҳои ҷамъшударо аз байн мебарад.
一.Чаро муҳаррикҳои хурди қадамгузориро интихоб кунед? - Бартариҳои механизми корӣ
Механизми дақиқи кории дар боло зикршуда аз хусусиятҳои техникии худи муҳаррики хурди қадамӣ бармеояд:
Рақамӣсозӣ ва ҳамоҳангсозии импулс:Мавқеи муҳаррик қатъиян бо шумораи импулсҳои вурудӣ ҳамоҳанг карда мешавад, ки ин имкон медиҳад, ки бо компютерҳо ва PLC-ҳо барои идоракунии пурраи рақамӣ ҳамгироии бефосила анҷом дода шавад. Ин интихоби беҳтарин барои санҷиши автоматӣ мебошад.
Хатои ҷамъшуда вуҷуд надорад:Дар шароити беборкунии аз ҳад зиёд, хатогии қадамии муҳаррики қадамӣ тадриҷан ҷамъ намешавад. Дақиқии ҳар як ҳаракат танҳо аз кори дохилии муҳаррик ва драйвер вобаста аст, ки эътимоднокиро барои озмоиши дарозмуддат таъмин мекунад.
Сохтори паймон ва зичии баланди моменти барқ:Тарҳи миниатюрӣ имкон медиҳад, ки он ба осонӣ дар дохили дастгоҳҳои озмоишии паймон ҷойгир карда шавад ва ҳамзамон моменти кофии ҳаракатро барои рондани массиви зонд таъмин намуда, тавозуни комилро байни иҷро ва андоза ба даст орад.
一.Ҳалли мушкилот: Технологияҳо барои беҳтар кардани самаранокии кор
Бо вуҷуди бартариҳои намоёни худ, дар татбиқи амалӣ, муҳаррикҳои хурди қадамӣ инчунин бо мушкилоте ба монанди резонанс, ларзиш ва эҳтимолияти талафоти қадамҳо рӯбарӯ мешаванд. Барои таъмини кори беайби он дар адаптерҳои санҷиши сӯзани электронӣ, саноат усулҳои зерини оптимизатсияро қабул кардааст:
Истифодаи амиқи технологияи гардонандаи микроқадам:Тавассути микроқадамгузорӣ, на танҳо қарори тасвир беҳтар мешавад, балки муҳимтар аз ҳама, ҳаракати муҳаррик ҳамвор мешавад ва ларзиш ва садоро ҳангоми хазидан бо суръати паст ба таври назаррас коҳиш медиҳад ва тамос бо зондро мувофиқтар мегардонад.
Муаррифии системаи идоракунии ҳалқаи пӯшида:Дар баъзе барномаҳои хеле серталаб, рамзгузорҳо ба муҳаррикҳои хурди қадамӣ илова карда мешаванд, то системаи идоракунии ҳалқаи пӯшидаро ташкил диҳанд. Система мавқеи воқеии муҳаррикро дар вақти воқеӣ назорат мекунад ва вақте ки аз қадам берун шудан (аз сабаби муқовимати аз ҳад зиёд ё сабабҳои дигар) ошкор карда мешавад, он фавран онро ислоҳ мекунад ва эътимоднокии идоракунии ҳалқаи кушодаро бо кафолати бехатарии системаи ҳалқаи пӯшида муттаҳид мекунад.
一.Хулоса
Хулоса, кори муҳаррикҳои хурди қадамӣ дар адаптерҳои санҷиши сӯзанҳои электронӣ ҳамчун намунаи комили табдил додани дастурҳои рақамӣ ба ҳаракатҳои дақиқ дар ҷаҳони физикӣ хизмат мекунад. Бо иҷрои як қатор амалҳои дақиқ идорашаванда, аз ҷумла қабули импулсҳо, анҷом додани ҳаракатҳои хурди қадамӣ ва нигоҳ доштани мавқеъ, он вазифаҳои муҳими ҳамоҳангсозии дақиқ, пахшкунии идорашаванда ва сканкунии мураккабро иҷро мекунад. Он на танҳо як ҷузъи калидии иҷрокунанда барои ноил шудан ба автоматикунонии санҷиш, балки як муҳаррики асосӣ барои баланд бардоштани дақиқӣ, эътимоднокӣ ва самаранокии санҷиш мебошад. Ҳангоме ки ҷузъҳои электронӣ ба сӯи миниатюризатсия ва зичии баланд таҳаввул меёбанд, технологияи муҳаррикҳои хурди қадамӣ, бахусус технологияи микроқадамӣ ва идоракунии ҳалқаи пӯшидаи он, технологияи санҷиши электрониро ба қуллаҳои нав пеш мебарад.
Вақти нашр: 26 ноябри соли 2025