Моторҳои қадамдастгоҳҳои ҳаракати дискретӣ бо бартарии арзон нисбат ба муҳаррикҳои серво дастгоҳҳое мебошанд, ки энергияи механикӣ ва электрикиро табдил медиҳанд. Моторе, ки энергияи механикиро ба энергияи электр табдил медихад, «генератор» номида мешавад; моторе, ки энергияи электрро ба энергияи механики табдил медихад "мотор" номида мешавад. Моторҳои қадам ва муҳаррикҳои серво маҳсулоти назорати ҳаракат мебошанд, ки метавонанд ҳаракати таҷҳизоти автоматизатсия ва тарзи ҳаракати онро дақиқ муайян кунанд ва асосан дар истеҳсоли таҷҳизоти автоматикунонӣ истифода мешаванд.
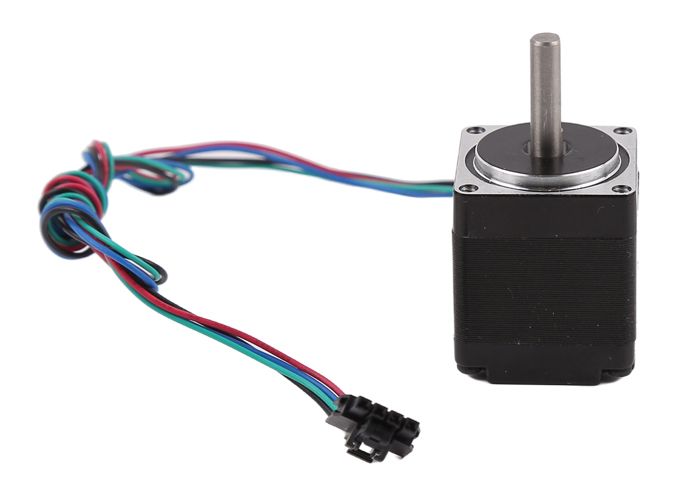
Се намуди ротори мотории қадам вуҷуд дорад: реактивӣ (навъи VR), магнити доимӣ (навъи PM) ва гибридӣ (навъи HB). 1) Реактивӣ (навъи VR): фишанги бо дандонҳои роторӣ. 2) Магнити доимӣ (навъи PM): ротор бо магнити доимӣ. 3) Гибрид (навъи HB): фишанги дорои магнити доимӣ ва дандонҳои роторӣ. Моторҳои қадамӣ аз рӯи печҳои статор тасниф мешаванд: силсилаи дуфазавӣ, сефазавӣ ва панҷфазавӣ мавҷуданд. Моторҳое, ки ду статор доранд, ба муҳаррикҳои дуфаза ва муҳаррикҳои дорои панҷ статор муҳаррикҳои панҷфазаӣ номида мешаванд. Чӣ қадаре ки муҳаррики қадам бештар фазаҳо ва зарбаҳо дошта бошад, ҳамон қадар дақиқтар аст.

Моторҳои HB метавонанд ба ҳаракати қадамҳои хурди афзояндаи хеле дақиқ ноил шаванд, дар ҳоле ки муҳаррикҳои PM одатан дақиқии баланди назоратро талаб намекунанд.Моторҳои HBметавонад ба талаботи мураккаб ва дақиқи назорати ҳаракати хаттӣ ноил шавад. Моторҳои PM аз ҷиҳати момент ва ҳаҷм нисбатан хурд мебошанд, одатан дақиқии баланди назоратро талаб намекунанд ва аз ҷиҳати хароҷот сарфакоронатаранд. Сохахои саноат: мошинхои бофандагй, борпечкунии хурокворй. Дар робита ба раванди истеҳсолот ва дурустии идоракунии мотор,Моторҳои қадами HBнисбат ба муҳаррикҳои қадами PM баландтаранд.
Моторҳои қадам ва муҳаррикҳои серво ҳарду маҳсулоти назорати ҳаракат мебошанд, аммо дар кори маҳсулоташон фарқ мекунанд. Моторҳои қадамдор як дастгоҳи ҳаракати дискретӣ мебошад, ки фармонро қабул мекунад ва қадамро иҷро мекунад. Моторҳои қадами сигнали импульси вурудиро ба ҷойивазкунии кунҷӣ табдил медиҳанд. Вақте ки ронандаи муҳаррики қадам сигнали импулсро мегирад, он муҳаррики қадамро барои гардиши кунҷи собит дар самти муқарраршуда бармегардонад. Моторҳои серво як системаи серво мебошад, ки дар он сигналҳои электрикӣ ба момент ва суръат табдил дода мешаванд, то объекти идоракуниро идора кунанд, ки суръат ва дақиқии мавқеъро идора карда метавонад.
✓ Моторҳои қадами, муҳаррикҳои серво аз ҷиҳати хусусиятҳои басомади паст, хусусиятҳои басомади лаҳза ва иқтидори изофабори хеле фарқ мекунанд:.
Аниқии назорат: фазаҳо ва қаторҳои муҳаррикҳои қадамӣ ҳар қадар зиёдтар бошанд, дақиқӣ ҳамон қадар баландтар мешавад; дурустии идоракунии муҳаррикҳои серво AC аз ҷониби рамзгузори гардишгар дар охири қафои чоҳи мотор кафолат дода мешавад, тарозуи рамзгузор бештар, дақиқ баландтар.
✓ Хусусиятҳои басомади паст: муҳаррикҳои қадам ба зуҳуроти ларзиши басомади паст дар суръати паст майл доранд, ин падидаи ларзиши басомади паст, ки аз рӯи принсипи кори муҳаррикҳои қадам муайян карда мешавад, ба кори муқаррарии мошин зараровар аст ва умуман технологияи демпингро барои бартараф кардани падидаи ларзиши басомади паст истифода мебарад; Системаҳои серво AC дорои функсияи рафъи резонанс мебошанд, ки метавонанд набудани сахтгирии мошинҳоро пӯшонанд. Амалиёт хеле ҳамвор аст ва ҳатто дар суръати паст ягон падидаи ларзиш ба амал намеояд.
✓ Хусусиятҳои моменти басомад: моменти баромади муҳаррикҳои қадам бо суръати афзоиш кам мешавад, бинобар ин суръати максималии кори онҳо 300-600 RPM аст; Муҳаррикҳои серво метавонанд моменти номиналӣ то суръати номиналӣ (умуман 2000-3000 RPM) бароварда шаванд ва суръати баландтари номиналӣ баромади доимии қувва аст.
✓ Қобилияти изофабори: муҳаррикҳои қадамӣ қобилияти изофабориро надоранд; муҳаррикҳои серво қобилияти пурқуввати изофабор доранд.
✓ Иҷрои вокуниш: муҳаррикҳои қадам барои суръат аз истода то суръати корӣ (якчанд сад гардиш дар як дақиқа) 200-400 мсро мегиранд; Сервои AC дорои сифати беҳтари суръатбахшӣ дорад ва метавонад дар ҳолатҳои назоратӣ истифода шавад, ки оғоз / қатъи зудро талаб мекунанд. Масалан, сервои Panasonic MASA 400W AC, дар тӯли чанд миллисония аз қатъ то суръати номиналии 3000RPM суръат мегирад.
Иҷрои амалиётӣ: муҳаррикҳои қадамӣ бо ҳалқаи кушода идора карда мешаванд ва ҳангоми басомади оғозёбӣ аз ҳад зиёд ё сарборӣ аз ҳад зиёд ба гум шудани қадам ё басташавӣ майл доранд ва ҳангоми боздоштани суръат аз ҳад зиёд баланд шуданро доранд; Сервои AC бо ҳалқаи пӯшида назорат карда мешавад ва ронанда метавонад сигнали бозгашти рамзгузори моторро мустақиман интихоб кунад, аз ин рӯ умуман талафоти қадам ё аз ҳад зиёди муҳаррики қадам нест ва иҷрои назорат боэътимодтар аст.
Сервои AC аз ҷиҳати иҷроиш аз муҳаррики қадам беҳтар аст, аммо муҳаррики қадам бартарии нархи паст дорад. Сервои AC аз муҳаррикҳои қадамӣ аз ҷиҳати суръати посух, иқтидори изофабори ва иҷрои кор бартарӣ дорад, аммо муҳаррикҳои қадам бо сабаби бартарии арзиши онҳо дар баъзе сенарияҳои камтар серталаб истифода мешаванд. Бо истифода аз технологияи пӯшида, муҳаррикҳои қадами пӯшида метавонанд дақиқӣ ва самаранокии аълоро таъмин кунанд, ки метавонанд ба баъзе аз иҷрои муҳаррикҳои серво ноил шаванд, аммо бартарии нархи паст доранд.
Ба пеш нигоҳ кунед ва минтақаҳои пайдошударо ҷойгир кунед. Барномаҳои муҳаррики Stepper тағироти сохториро паси сар карданд, ки бозори анъанавӣ ба сершавӣ расид ва соҳаҳои нав пайдо шуданд. Моторҳои идоракунӣ ва маҳсулоти системаи гардонандаи ширкат дар асбобҳои тиббӣ, роботҳои хидматрасонӣ, автоматикунонии саноатӣ, иттилоот ва коммуникатсия, амният ва дигар соҳаҳои рушдёбанда, ки ҳиссаи нисбатан калони тиҷорати умумиро ташкил медиҳанд, амиқ ҷойгир шудаанд ва бо суръати тез рушд мекунанд. Талабот ба двигательхои теплоходй ба иктисодиёт, технология, дарачаи автоматикунонии саноат ва дарачаи тараккиёти техникии худи двигательхо вобаста аст. Бозор дар соҳаҳои анъанавӣ, аз қабили автоматикунонии офис, камераҳои рақамӣ ва асбобҳои маишӣ ба қаноатмандӣ расидааст, дар ҳоле ки соҳаҳои нав, ба монанди чопи 3D, тавлиди нерӯи офтоб, таҷҳизоти тиббӣ ва барномаҳои автомобилӣ ба вуҷуд меоянд.
| Майдонхо | Барномаҳои мушаххас |
| Автоматикунонии офис | Принтерҳо, сканерҳо, нусхабардорҳо, MFPҳо ва ғайра. |
| Равшании саҳна | Назорати самти рӯшноӣ, фокус, тағирёбии ранг, назорати нуқта, эффектҳои рӯшноӣ ва ғайра. |
| Бонкдорӣ | Мошинҳои банкоматҳо, чопи ҳисобҳо, истеҳсоли кортҳои бонкӣ, мошинҳои ҳисобкунии пул ва ғайра. |
| Тиббй | Сканери КТ, таҳлилгари гематологӣ, таҳлилгари биохимия ва ғайра. |
| саноатй | Мошинҳои нассоҷӣ, мошинҳои бастабандӣ, роботҳо, конвейерҳо, хатҳои васлкунӣ, мошинҳои ҷойгиркунӣ ва ғайра. |
| Муошират | Шарти сигнал, ҷойгиркунии мавҷгири мобилӣ ва ғайра. |
| Амният | Назорати ҳаракат барои камераҳои назоратӣ. |
| Автомобилӣ | Идоракунии клапани нафт/газ, системаи идоракунии сабук. |
Саноати рушдёбанда 1: Чопи 3D пешрафтҳоро дар технологияи R&D идома медиҳад ва сенарияҳои татбиқро дар поёноб васеъ мекунад ва бозорҳои дохилӣ ва байналмилалӣ бо суръати тақрибан 30% афзоиш меёбанд. Чопи 3D ба моделҳои рақамӣ асос ёфта, маводҳоро қабат ба қабат барои эҷоди объектҳои ҷисмонӣ муттаҳид мекунад. Мотор як ҷузъи муҳими қудрат дар принтери 3D мебошад, дақиқии муҳаррик ба таъсири чопи 3D, умуман чопи 3D бо истифода аз муҳаррикҳои stepper таъсир мерасонад. 2019, миқёси ҷаҳонии саноати чопи 3D 12 миллиард долларро ташкил медиҳад, ки дар муқоиса бо сол 30% афзоиш ёфтааст;.

Саноати рушдёбанда 2: Роботҳои мобилӣ тавассути компютер идора карда мешаванд, ки дорои функсияҳо ба монанди ҳаракат, паймоиши автоматӣ, назорати чандсенсорӣ, ҳамкории шабакавӣ ва ғайра мебошанд. Муҳимтарин истифода дар истеҳсолоти амалӣ коркард, бо дараҷаи баланди ғайристандартизатсия мебошад.
Дар модули гардонандаи роботҳои мобилӣ муҳаррикҳои қадамӣ истифода мешаванд ва сохтори асосии гардонанда аз муҳаррикҳои гардонанда ва фишангҳои редуксионӣ (қуттиҳои редуктор) ҷамъ карда мешавад. Ҳарчанд саноати роботҳои саноатии ватанӣ нисбат ба кишварҳои хориҷӣ дер оғоз шуда бошад ҳам, дар соҳаи роботҳои мобилӣ аз кишварҳои хориҷӣ пеш аст. Дар айни замон, ҷузъҳои асосии роботҳои мобилӣ асосан дар дохили кишвар истеҳсол карда мешаванд ва корхонаҳои ватанӣ асосан ба талаботи дақиқ дар ҳама ҷиҳат расидаанд ва корхонаҳои рақобатпазири хориҷӣ камтаранд.

Андозаи бозори роботҳои мобилии Чин дар соли 2019 тақрибан 6,2 миллиард долларро ташкил хоҳад дод, ки нисбат ба соли гузашта 45% зиёд аст. Ифтитоҳи байналмилалии роботҳои тозакунандаи касбӣ бо афзоиши назарраси самаранокии тозакунӣ. Ифтитоҳи "роботи дуввум" дар соли 2018 пас аз ба кор андохтани роботи инсонӣ сурат мегирад. "Роботи дуюм" роботи интеллектуалии тиҷории чангкашак бо сенсорҳои сершумор барои ошкор кардани монеаҳо, зинапояҳо ва ҳаракати инсон мебошад. Он метавонад бо як барқ се соат кор кунад ва то 1500 метри мураббаъро тоза кунад. Роботи дуюм» кисми зиёди кори харрузаи коргарони фаррошро иваз карда, ба гайр аз корхои мавчудаи тозакунй суръати чангкашак ва тозакуниро зиёд карда метавонад.
Саноати рушдёбанда 3: Бо ҷорӣ намудани 5G, шумораи мавҷгирҳо барои пойгоҳҳои алоқа зиёд шуда, шумораи муҳаррикҳои зарурӣ низ меафзояд. Умуман, 3 мавҷгир барои пойгоҳҳои оддии алоқа, 4-6 мавҷгир барои пойгоҳҳои пойгоҳи 4G ва афзоиши минбаъдаи шумораи пойгоҳҳо ва антеннаҳо барои барномаҳои 5G, зеро онҳо бояд алоқаи анъанавии телефони мобилӣ ва барномаҳои иртиботи IoT-ро фаро гиранд. Маҳсулоти мотории идоракунӣ бо ҷузъҳои қуттии редуктор ба як таҳияи маъмули фармоишии нерӯгоҳҳои мавҷгирҳои пойгоҳ табдил меёбанд. Барои ҳар як мавҷгири ESC як муҳаррики назоратӣ бо қуттии редуктор истифода мешавад.
Шумораи пойгоҳҳои пойгоҳи 4G дар соли 2019 ба 1,72 миллион афзоиш ёфт ва интизор меравад, ки сохтмони 5G давраи навро боз кунад. Дар соли 2019 шумораи пойгоҳҳои телефонҳои мобилӣ дар Чин ба 8 миллиону 410 ҳазор нафар расид, ки 5 миллиону 440 миллиони он пойгоҳҳои пойгоҳи 4G буда, 65% -ро ташкил медиҳад. 2019, шумораи пойгоҳҳои нави пойгоҳи 4G ба 1,72 миллион зиёд шуд, ки аз соли 2015 бештарин аст, асосан аз ҳисоби тавсеаи шабака барои пӯшонидани нуқтаҳои нобино дар деҳот. 2) Иқтидори шабакаи аслӣ барои гузоштани таҳкурсӣ барои сохтмони шабакаи 5G такмил дода мешавад. Иҷозатномаи тиҷоратии 5G-и Чин дар моҳи июни соли 2019 дода мешавад ва то моҳи майи соли 2020 дар саросари кишвар беш аз 250 000 пойгоҳҳои пойгоҳи 5G боз хоҳанд шуд.
Саноати рушдёбанда 5: Таҷҳизоти тиббӣ яке аз сенарияҳои асосии татбиқи муҳаррикҳои қадамӣ буда, яке аз сегментҳое мебошанд, ки Vic-Tech дар он амиқ иштирок мекунад. Аз металл то пластикӣ, дастгоҳҳои тиббӣ дар истеҳсоли онҳо сатҳи баланди дақиқро талаб мекунанд. Бисёре аз истеҳсолкунандагони дастгоҳҳои тиббӣ барои қонеъ кардани талаботҳои дақиқ муҳаррикҳои серворо истифода мебаранд, аммо азбаски муҳаррикҳои қадамӣ нисбат ба сервоҳо сарфакортаранд ва хурдтаранд ва дақиқӣ метавонад ба баъзе дастгоҳҳои тиббӣ ҷавобгӯ бошад, муҳаррикҳои қадам дар саноати истеҳсоли таҷҳизоти тиббӣ истифода мешаванд ва ҳатто баъзе моторҳои серворо иваз мекунанд.

Вақти фиристодан: май-19-2023